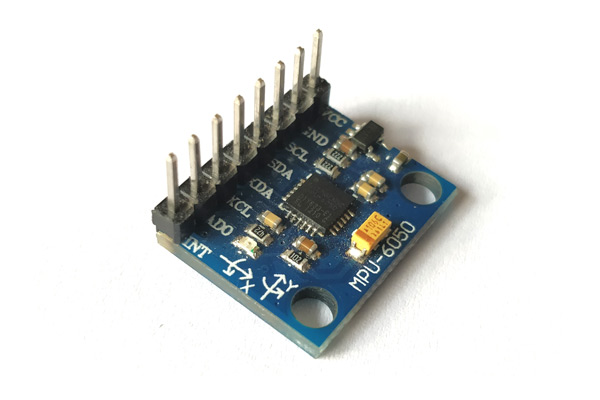
The MPU6050 is a Micro-Electro-Mechanical System (MEMS) which consists of a 3-axis Accelerometer and 3-axis Gyroscope inside it. This helps us to measure acceleration, velocity, orientation, displacement, and many other motion-related parameters of a system or object. This module also has a Digital Motion Processor(DMP) inside it which is powerful enough to perform complex calculations and thus free up the work for Micro-controller.
Main Features:
- MEMS 3-axis accelerometer and 3-axis gyroscope values combined
- Power Supply: 3-5V
- Built-in 16-bit ADC provides high accuracy
- Built-in DMP provides high computational power
- Can be used to interface with other I2C devices like the magnetometer, etc
- Configurable I2C Address
Protocol:
Here, I2C protocol is used.
Step 1: What You Will Need
- Arty7 35t/100t board with either
pinaka, parashu or vajraprogrammed - MPU6050.
- Micro USB Cable.
- Jumper Wires.
- shakti-sdk and shakti-tools installed or Platform IO installed and ready
Note: shakti-sdk and shakti-tools are currently a private repository. Please login or sign up to Gitlab and request access here before using it.
Step 2: The Circuit
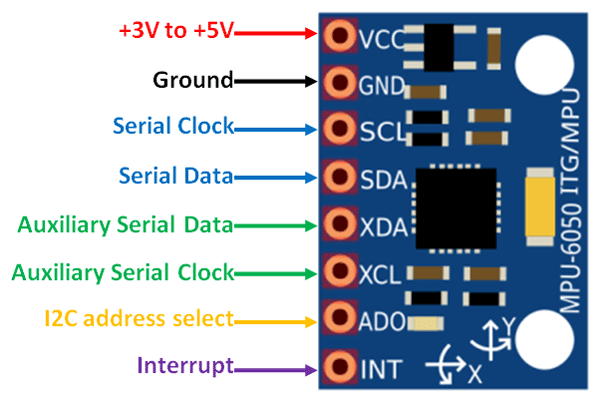
Connection of MPU6050 sensors,
- VCC connect to +3V to +5V
- GND to GND
- SCL to SCL
- SDA to SDA
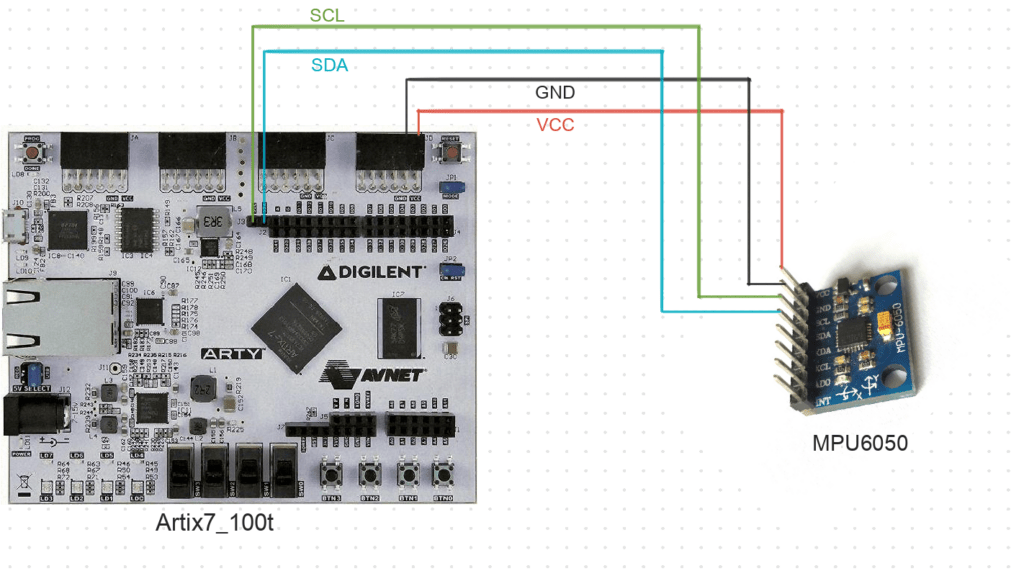
Here we use Arty100t for instance. Also, the connections are the same in Arty35t boards. For better clarity, Check the device pin mapping for pinaka, parashu and vajra.
Step 3: Code
Please click here to have a look at the code of MPU6050.
Note: shakti-sdk and shakti-tools are currently a private repository. Please login or sign up to Gitlab and request access here before using it.
Code can be compiled and run using the following ways,
- Using terminal on a system with shakti-sdk and shakti-tools installed (Manual method).
- Using Platform IO IDE.
Step 4.1: Manual Method
4.1.1 Compile and build
- Move to
shakti-sdk
cd shakti-sdk
- Compile using
make software PROGRAM=? TARGET=?. Typemake list_applnsto list all the applications available in the SDK. Target can be eitherparashu, pinaka or vajra.
For instance, Use target as parashu,
make software PROGRAM=mpu6050 TARGET=parashu
4.1.2 Execution:
Once the application is built, the executable is generated in the output folder. The executable is in ELF file format and they have the extension .shakti. Now, open three terminals, one for each of the following,
- One terminal for UART terminal display
(miniterm) - Another for
GDB server - And the last one for
OpenOCD.
Terminal 1: Firstly Connect to serial output by using miniterm or gtkterm with the baud rate of 19200.
For instance,
$ sudo miniterm.py /dev/ttyUSB1 19200
Note:
- “/dev/ttyUSB1” – ttyUSB means “USB serial port adapter”
- The “1” (“0” or “1” or “2”“here means the USB device number on your system. The FPGA board is connected to that USB device number.
Terminal 2: After that, Connect to the FPGA board by using the OpenOCD provided by shakti-tools and its respective configuration file. (Read how OpenOCD and RISC-V GDB work together to establish a connection between our PC and the Microprocessor)
For instance, if we use parashu,
$ cd shakti-sdk $ cd ./bsp/third_party/parashu $ sudo $(which openocd) -f ftdi.cfg
For pinaka and vajra, Goto cd ./bsp/third_party/<pinaka or vajra>
Terminal 3: Now, open either 32-bit or 64-bit RISC-V GDB based on your architecture i.e riscv32-unknown-elf-gdb or riscv64-unknown-elf-gdb respectively from shakti-tools.
The output executable is created in <path-to-shakti-sdk>/software/examples/i2c_applns/mpu6050/output as mpu6050.shakti. Load up the .shakti file by following the below steps,
$ riscv32-unknown-elf-gdb
(gdb) set remotetimeout unlimited (gdb) target remote localhost:3333 (gdb) file path/to/executable (gdb) load (gdb) c
4.1.3 Upload to flash
Steps to generate standalone user application:
The SHAKTI-SDK has a uploader tool that is used to load a content (such as ELF) to flash, after building the image.
- Goto the right directory.
cd shakti-sdk
- The make upload command is used to build and upload the application to the flash automatically.
make upload PROGRAM=mpu6050 TARGET=parashu
PROGRAM is the new bare metal user application that is created. Type make list_applns to list all the applications available in the SDK.
Step 4.2: Using Platform IO
We can use IDE’s like Platform IO to compile, build, run, upload and debug. Please read the article on Platform IO on SHAKTI to understand the steps.
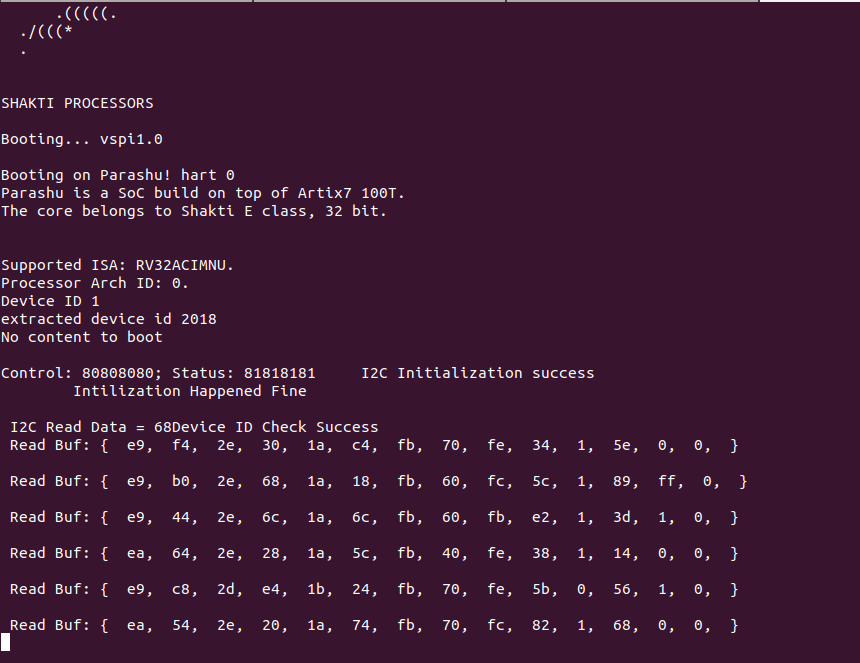
Miniterm Output
Akshaya currently works at the RISE labs. Her favorite subjects are Web designing and Microprocessors. She loves learning about new things and writing about them!